
/prod01/channel_54/media/header-images/ThinkstockPhotos-91039657-crop.jpg)
Remote Sensing with Mobile LiDAR and Imaging Sensors for Railroad Bridge Inspections
Funding Agency: National Academies of Sciences (NAS) Transportation Research Board (TRB) Safety IDEA Program, Washington, DC
Period: August 2014 - August 2016
Railroad and highway bridges are critical elements of transportation systems that directly affect society’s overall quality of life and other major socio-economic aspects. In the United States, there are more than 76,000 railroad bridges that cover over 1,700 miles. Thousands of steel bridge spans currently in service are nearly a century old. A significant number of highway bridges have also been in service for many years, requiring detailed inspections to ensure public safety. Bridge inspections are typically time-consuming, often involve costly traffic delays, and may require inspectors to be in very high-risk settings.
The overall goal of this 2-year research project (federal grant/award) was to investigate the applicability of mobile LiDAR and image data for railroad bridge inspections. The solution approach for this research involved field tests to collect images of bridge defects using high-definition cameras to develop prototypes of image processing algorithms for defect detection and classification. It also involved the collection of 3D point cloud data of railroad bridges using a state-of-the-art mobile LiDAR sensor to develop 3D models of bridge structures. The resulting 3D models were used to detect particular defects such as structural deformations due to settlement. After successful development of image processing algorithms and 3D models, the research called for integration of the sensors into an unmanned aerial system (UAS) to improve the efficiency related to data collection, particularly of highly inaccessible bridge components.
|
|
|
 |
|
Multi-purpose Autonomous Vehicle - Flat Eight (MAV-F8) Fully Developed In-House by Grad Students!! |
Grad students ready to work on the MAV-F8... |
MAV-F8 during mission flight (CSX railroad bridge) |


.
|
|
|
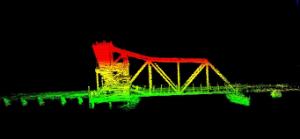
(Top) Side-view image of CSX's bridge (Bottom) 3D model from LiDAR data |

Proof of Concept for Using Unmanned Aerial Vehicles for HML and Bridge Inspections
(see Bridging the Safety Gap, Forward Florida Economic Development News)
Funding Agency: Florida Department of Transportation (FDOT) - Main Office's Research Center, Tallahassee, FL
Period: July 2013 - July 2015
The inspection of structures such as bridges and high mast lighting (HML) poles depends heavily on visual assessments from experienced field inspectors. State agencies rely on these visual inspections to make key decisions about the health of structures–such as allocation of human resources and funds to maintain/repair structures—that significantly affect public safety and costs.
Visual inspection of HML structures often involve the use of binoculars, which is a time-consuming approach given that these structures require a 360-degree view. The use of heavy machinery during bridge inspections requires maintenance of traffic procedures that produce lengthy traffic interruptions. Many times, visual assessments require inspectors to be transported with construction equipment beneath bridges, or placed in very high-risk settings.
To assist structural inspectors during the inspection process, this research proposed the development of an unmanned aerial video data collection system. The envisioned system consists of a small-scale unmanned aerial vehicle (UAV) hosting a camera or small mobile device (e.g., cellular phone), and a ground viewing station (e.g., tablet PC or laptop) that will show near-real time images being captured by the camera attached to the UAV. This system would require a customized and complex data management server software package for storing and managing collected image data. It would also require customized mobile software for an onboard device and for remote viewing. The development of this advanced image data collection system, which will require a systems engineering approach that integrates the latest in software engineering and mobile technology, was divided into the following two major project stages:
* Stage 1: Conceptual system design and proof of concept tests
* Stage 2: System development and integration
The objective of this research project was to complete Stage 1, which involved extensive controlled experiments and field testing activities with various UAVs. The completion of Stage 1 will laid the foundation to fully develop the system during Stage 2 by providing critical insights such as expected capabilities and limitations.