
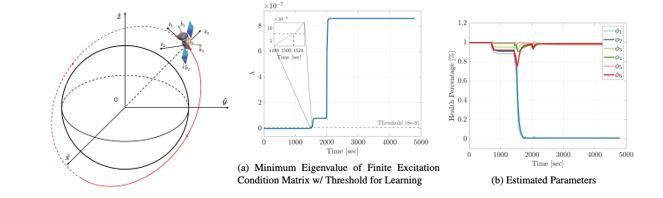
In the context of Space Situational Awareness applications, multiple strategies have been proposed to capture a non-cooperative object in orbit for a subsequent disposal. This project focuses on the post-capture scenario where a small module equipped with Reaction Wheels (RW) and a 2 DOF propulsion system, is attached to a larger object. The new rigid body has uncertain physical parameters, making it difficult to maintain attitude due to RW saturation if the thrust vector is not correctly aligned. Adaptive control and/or machine learning techniques are explored to address this problem.
This project considers a spacecraft equipped with a redundant reaction wheel array that over time loses performance of one or more of its main attitude control actuators. System identification algorithms, along with control allocation strategies are combined to maintain performance in the presence of degradation or actuator loss.
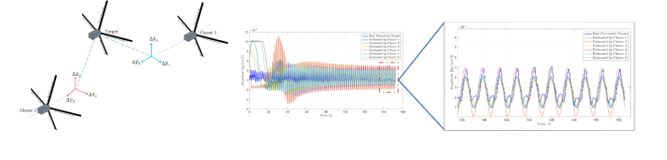
This project considers a set of spacecraft performing relative maneuvers. The agents use adaptive control combined with online sparse identification techniques for online estimation of differential drag-related parameters.
This project will use Florida Tech’s Helmholtz cage and air bearing to design and build a satellite attitude testbed. The testbed will have an onboard Jetson nano computer, four reaction wheels and three magnetorquers. An attitude determination algorithm based on magnetometer and gyro measurements will be implemented, as well as a Lyapunov-based attitude controller. This testbed will serve as the last validation stage for SVR’s GNC algorithms.
© Florida Institute of Technology, All Rights Reserved