Spacecraft Dynamics Control Near Asteroids
We have designed several adaptive and optimal control techniques for close proximity operations near asteroids. We are currently working designing navigation and path planning techniques for spacecraft swarms near asteroids.
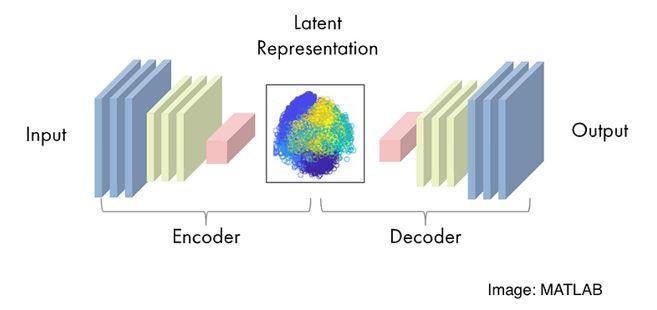
Data-Driven Linear Representations and System ID
We are working with machine learning based methodologies to develop data-driven system identification and control techniques with applications to aerospace systems such as UAVs and spacecrafts. Our approach lets us linearize highly non-linear dynamical systems and thus provide a robust linearization scheme compared to traditional techniques such as Taylor series expansion.
Experimental Testbed For Multi-Agent System
The experimental team is working towards the development and operation of a set of simulated and real-world testing platforms for the testing and demonstration of newly created control systems from the Autonomy Lab. These tools include the use of simulation environments such as Gazebo that allow for the testing of experimental algorithms designs in a digital environment. In addition to these simulation tools, the use of quadcopter hardware like the ModalAI Voxl m500 allows the team to test experimental code in a real-world environment using camera based, GPS-denied navigation, tracking, and object avoidance. The experimental team serves as the bridge between the theoretical and practical environments of the autonomous systems designs being created by the Autonomy Lab team.
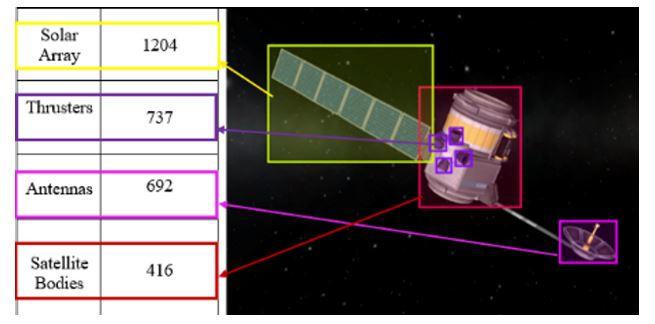
Computer Vision & Navigation
Computer Vision and Navigation: We are working on developing state-of-the-art vision and localization algorithms for autonomous aerospace systems. We are employing computationally efficient machine learning techniques. Our focus is on developing hybrid approaches that can leverage artificial intelligence and classical visions and navigation techniques.