/prod01/channel_54/media/fit-website/site-assets/images/FT-Horiz_crimson-gold.png)
/prod01/channel_54/media/content-type-creator/fit-redesign-images-01/campus-bg.jpg)
George Nehma
Ph.D. Student
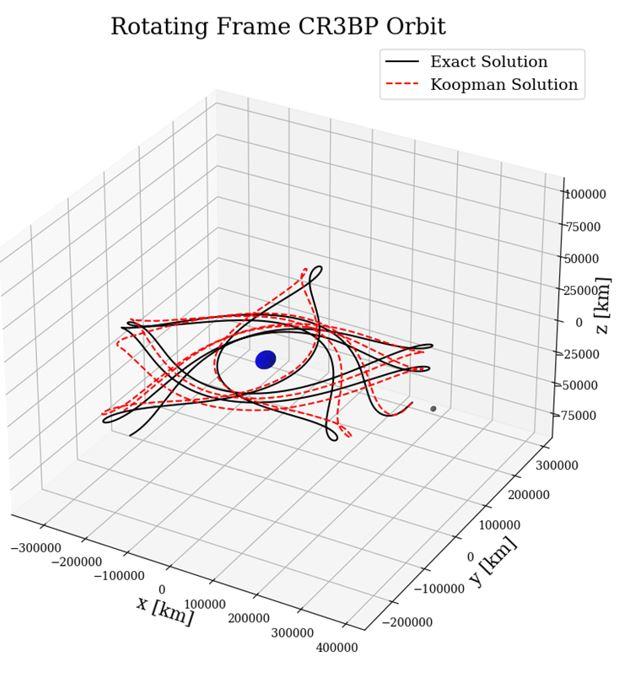
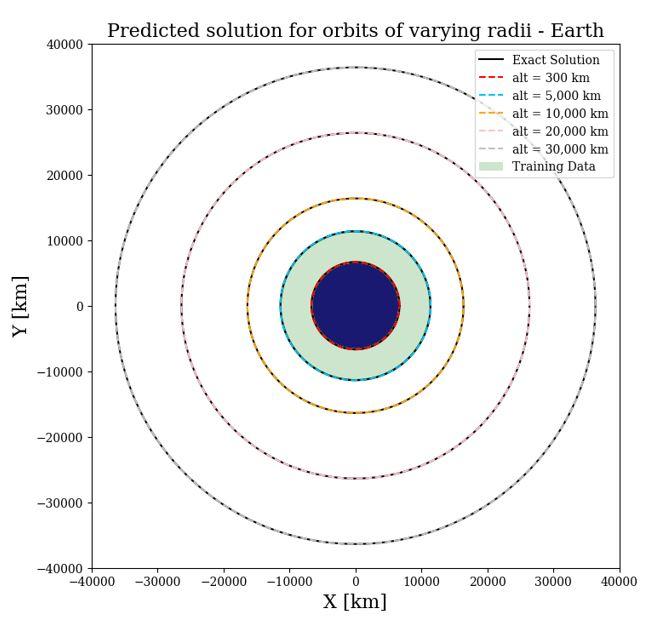
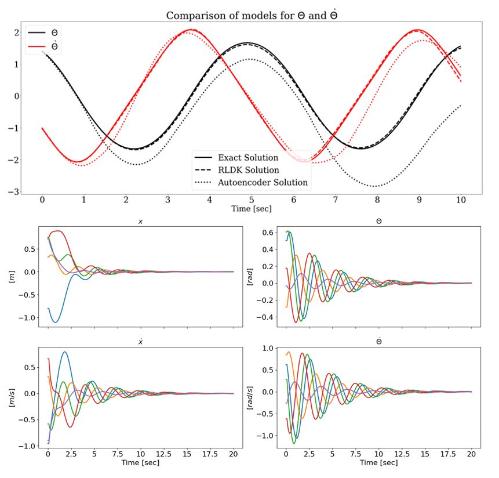
Research Area: Deep learning Koopman operator theory for linearization and optimal control of nonlinear dynamical systems
Masters Thesis title: Deep Learning System Identification, Linearization and Control of Dynamical Systems utilizing Koopman Theory with Applications in Orbital Systems
PhD Thesis title : Guided Imitation Learning for Autonomous Spacecraft Control Using Reinforcement Learning Experts
Research Area: Deep Koopman operator theory with emphasis on developing linear control systems for complex nonlinear space applications. End to End control of autonomous spacecraft using Reinforcement Learning coupled with Imitation Learning.
Expected graduation date: May 2027